Pintura robótica — cobertura uniforme, sem desperdício, sem reprogramação
Trajetórias otimizadas para pintura geradas do CAD — com simulação de cobertura antes de executar.
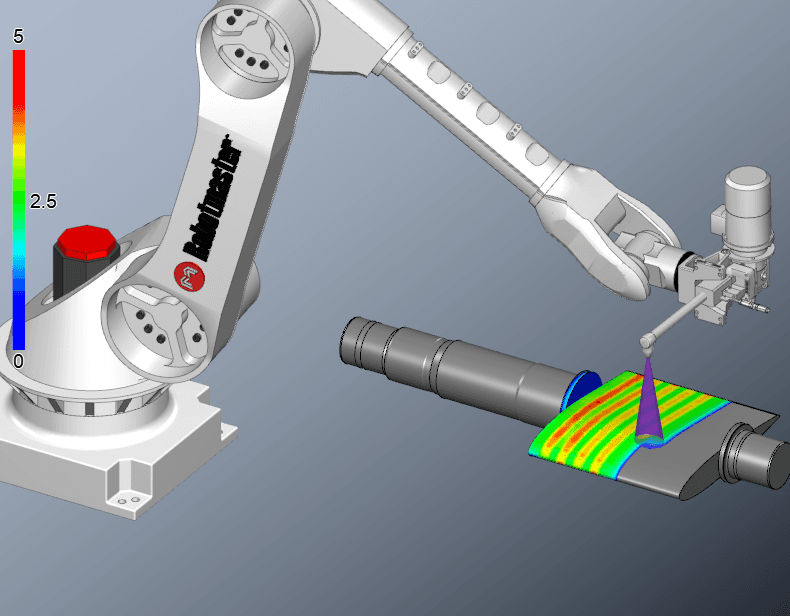
A programação offline para pintura gera as trajetórias do robô diretamente do modelo CAD da peça — com controle preciso de sobreposição entre passadas, distância da superfície e parâmetros do spray.
O Robotmaster® inclui simulação visual de cobertura: antes de executar o programa real, você vê exatamente quais regiões da peça receberão tinta e em que espessura — eliminando incertezas e desperdício.
Quando a geometria da peça muda, o programa é regerado em minutos a partir do novo CAD — sem reprogramação manual na célula.
Desafios que o Robotmaster® elimina
Cobertura irregular que gera refugo e retrabalho em peças acabadas
Desperdício de tinta por sobreposição excessiva ou padrão de passada inconsistente
Reprogramação frequente sempre que a geometria da peça muda
Necessidade de expertise específica em pintura para programar a célula
Por que programar pintura com o Robotmaster®
Simulação de cobertura antes da execução
Visualize a cobertura do spray em toda a peça na simulação — antes de usar uma gota de tinta.
Ajuste de spray, distância e camadas
Configure forma do spray, diâmetro do bico, distância da superfície e número de camadas por região.
Espaçamento uniforme entre passadas
Sobreposição calculada automaticamente para cobertura consistente em toda a geometria da peça.
Programa gerado a partir do CAD
Do modelo 3D ao programa do robô — sem programação manual. Mudou a peça, regera em minutos.