Pintura robótica — cobertura uniforme, sin desperdicio, sin reprogramación
Trayectorias optimizadas para pintura generadas del CAD — con simulación de cobertura antes de ejecutar.
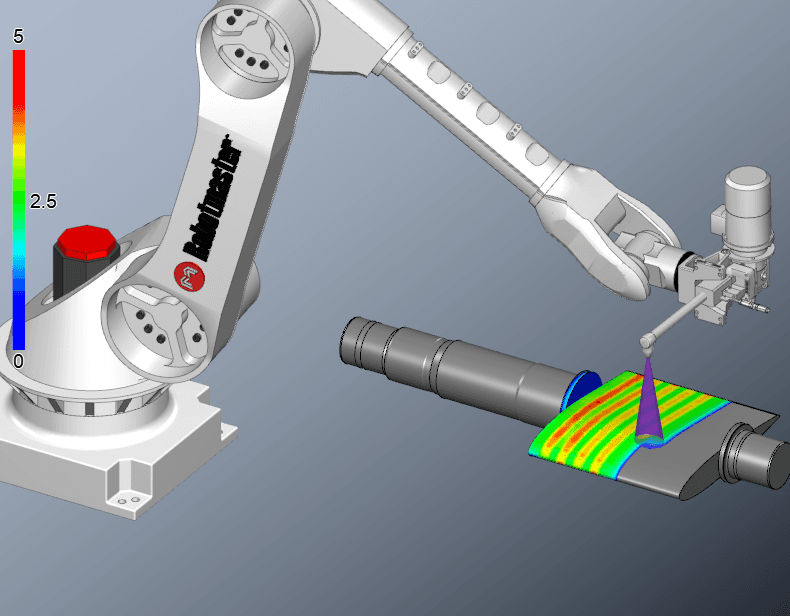
La programación sin conexión para pintura genera las trayectorias del robot directamente del modelo CAD de la pieza — con control preciso de sobreposición entre pasadas, distancia de la superficie y parámetros del spray.
Robotmaster® incluye simulación visual de cobertura: antes de ejecutar el programa real, usted ve exactamente qué regiones de la pieza recibirán pintura y en qué espesor — eliminando incertidumbres y desperdicio.
Cuando cambia la geometría de la pieza, el programa se regenera en minutos desde el nuevo CAD — sin reprogramación manual en la celda.
Desafíos que Robotmaster® elimina
Cobertura irregular que genera desperdicio y retrabajo en piezas terminadas
Desperdicio de pintura por sobreposición excesiva o patrón de pasada inconsistente
Reprogramación frecuente cada vez que cambia la geometría de la pieza
Necesidad de experiencia específica en pintura para programar la celda
Por qué programar pintura con Robotmaster®
Simulación de cobertura antes de la ejecución
Visualice la cobertura del spray en toda la pieza en la simulación — antes de usar una gota de pintura.
Ajuste de spray, distancia y capas
Configure forma del spray, diámetro de la boquilla, distancia de la superficie y número de capas por región.
Espaciado uniforme entre pasadas
Sobreposición calculada automáticamente para cobertura consistente en toda la geometría de la pieza.
Programa generado desde el CAD
Del modelo 3D al programa del robot — sin programación manual. Cambió la pieza, se regenera en minutos.